Leitfaden zur Verwendung von PIC16F877A für Schrittmotorprojekte
Der Microcontroller PIC16F877A wird in vielen elektronischen Projekten häufig verwendet, da er eine gute Balance zwischen Funktionen und Benutzerfreundlichkeit bietet.In diesem Leitfaden werfen wir den PIC16F877a genau an, der alles von seiner Pinout- und CAD -Modelle bis zu seiner Verwendung bei der Kontrolle von Stepper -Motoren abdeckt.Unabhängig davon, ob Sie ein einfaches Gerät oder ein komplexes Automatisierungsprojekt erstellen. Wenn Sie verstehen, wie Sie mit diesem Mikrocontroller Motoren anschließen und steuern, können Sie die besten Ergebnisse erzielen.
Katalog

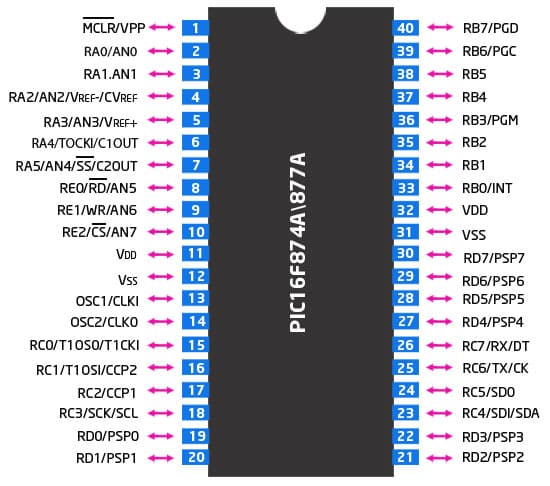
PIC16F877A PIN -Konfiguration
CAD -Modelle für pic16f877a
PIC16F877A Diagramm Symbol
PIC16F877A PCB Footprint

3D -Modell
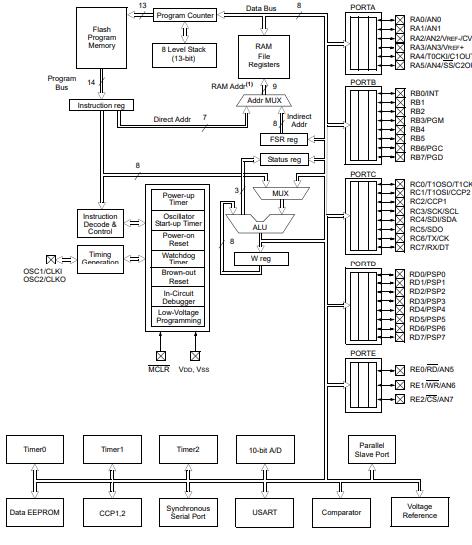
PIC16F877a interne Struktur
Detaillierte technische Spezifikationen
| Typ | Parameter |
| Fabrikvorlaufzeit | 7 Wochen |
| Montieren | Durch Loch |
| Montagetyp | Durch Loch |
| Paket / Fall | 40 DIP (0,600, 15,24 mm) |
| Anzahl der Stifte | 40 |
| Datenkonverter | A/D 8x10b |
| Anzahl der I/Os | 33 |
| Wachhund -Timer | Ja |
| Betriebstemperatur | -40°C ~ 85°C ta |
| Verpackung | Rohr |
| Serie | Bild® 16f |
| Veröffentlicht | 1997 |
| JESD-609 Code | E3 |
| Pbfree Code | Ja |
| Teilstatus | Aktiv |
| Feuchtigkeitsempfindlichkeit (MSL) | 1 (unbegrenzt) |
| Anzahl der Terminen | 40 |
| ECCN -Code | Ear99 |
| Terminal Finish | Matte Zinn (SN) - getempert |
| Zusätzliche Funktion | Arbeitet bei 4 V Mindestversorgung |
| Endposition | DUAL |
| Versorgungsspannung | 5v |
| Frequenz | 20MHz |
| Basisteilnummer | Pic16f877a |
| Stiftanzahl | 40 |
| Versorgungsspannungsmax (VSUP) | 5,5 V |
| Netzteile | 5v |
| Versorgungsspannungs-Min (VSUP) | 4,5 V |
| Schnittstelle | I2C, SPI, SSP, UART, USAart |
| Speichergröße | 14 kb |
| Oszillatortyp | Extern |
| Nominalversorgungsstrom | 1,6 mA |
| RAM -Größe | 368 x 8 |
| Spannung - Versorgung (VCC/VDD) | 4v ~ 5,5 V |
| UPS/UCS/periphere ICS -Typ | Mikrocontroller, RISC |
| Kernprozessor | Bild |
| Peripheriegeräte | Braun-Out-Erfassungs-/Reset, POR, PWM, WDT |
| Programmspeichertyp | BLITZ |
| Kerngröße | 8-Bit |
| Programmspeichergröße | 14 kb (8k x 14) |
| Konnektivität | I2c, spi, uart/usart |
| Bitgröße | 8 |
| Zugriffszeit | 20 µS |
| Hat ADC | Ja |
| DMA -Kanäle | NEIN |
| Datenbusbreite | 8b |
| Anzahl der Timer/Zähler | 3 |
| Adresse Busbreite | 8b |
| Dichte | 112 kb |
| EEPROM -Größe | 256 x 8 |
| CPU -Familie | Bild |
| Anzahl der ADC -Kanäle | 8 |
| Anzahl der PWM -Kanäle | 2 |
| Anzahl der I2C -Kanäle | 1 |
| Höhe | 4,06 mm |
| Länge | 52,45 mm |
| Breite | 14,22 mm |
| SVHC erreichen | Kein SVHC |
| Strahlenhärtung | NEIN |
| ROHS -Status | ROHS3 -konform |
| Frei führen | Frei führen |
Steppermotoren verstehen
Ein Schrittmotor ist eine Art Elektromotor, der sich in bestimmten Schritten und nicht in kontinuierlicher Bewegung wie herkömmliche Motoren bewegt.Diese Schritt-für-Schritt-Bewegungen werden in Grad gemessen, was je nach Anwendung variieren kann.
Steppermotoren können in verschiedenen Modi betrieben werden: Wellenantrieb, Vollfahrt und Halbantrieb.Jeder Modus steuert, wie die Motorphasen mit Energie versorgt werden, was sich auf die Leistung auswirkt und sie für verschiedene Verwendungszwecke geeignet ist.
Im Wellenantriebsmodus wird jeweils nur eine Phase des Motors angetrieben.Dieser einfache Steuermodus ist nützlich für Situationen, in denen die Stromversorgungswirkungsgrad über das Drehmoment priorisiert wird, z. B. in grundlegenden Automatisierungsaufgaben, in denen minimaler Startstrom erforderlich ist.
Der vollständige Antriebsmodus betreibt zwei Phasen gleichzeitig.Dies führt zu einer höheren Drehmomentleistung, wenn zwei Spulen zusammenarbeiten, was es ideal für Anwendungen macht, bei denen Präzision und Festigkeit erforderlich sind, z. B. in Robotik- und CNC -Maschinen.
Der Halbantriebsmodus kombiniert die Merkmale von Wellen und vollem Antrieb, indem es abwechselnd eine Phase und zwei Phasen anregt.Dieser Ansatz bietet kleinere Stufengrößen und verdoppelt die Auflösung des Motors effektiv.Half Drive eignet sich am besten für Anwendungen wie 3D -Druck und feine Instrumente, bei denen eine reibungslose Bewegung und eine präzise Positionierung unerlässlich sind.
Betrachten Sie bei der Auswahl eines Schrittmotors für eine bestimmte Verwendung die Betriebsumgebung.Bei hochpräzisen Aufgaben wird der Halbantriebsmodus empfohlen, um reibungslose Übergänge und reduzierte Vibrationen zu gewährleisten.Für Projekte, die sich auf Energieeinsparungen konzentrieren, kann der Wellenantriebsmodus angemessener sein.
Die Auswahl des richtigen Modus erfordert Ausgleichsfaktoren wie Drehmoment, Geschwindigkeit und Systemkomplexität.Die Auswahl des richtigen Modus kann die Leistung des Motors und die Gesamteffizienz Ihres Systems erheblich beeinflussen.
Anschließen eines Schrittmotors mit PIC16F877A
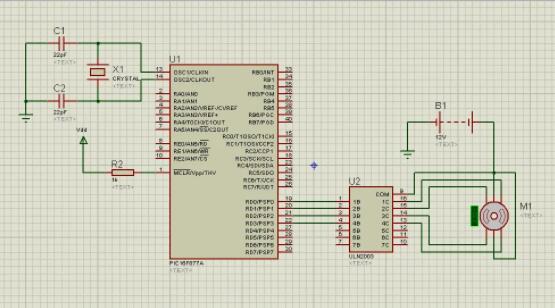
Einen Schrittmotor mit einem anschließen Pic16f877a Mikrocontroller, Sie können das ULN2003 -Transistor -Array verwenden.Diese integrierte Schaltung, die für Hochtorque-Motoren entwickelt wurde, enthält sieben Darlington-Paare.Die unteren Portd -Bits des Mikrocontrollers sind mit den Eingangsnadeln (1B, 2B, 3B, 4B) des ULN2003 verbunden, während seine Ausgangsstifte (1C, 2C, 3C, 4C) mit den Stiften des Stepper -Motors verbunden sind.Die gemeinsamen Stifte des Motors und der COM -Pin des ULN2003 sind mit einer 12 -V -Netzteil verbunden.
Steppermotoren werden üblicherweise für Anwendungen verwendet, die eine präzise Bewegungsregelung erfordern.Sie wandeln digitale Impulse in mechanische Rotation um und machen sie ideal für Geräte wie CNC -Maschinen und 3D -Drucker, bei denen Position und Geschwindigkeit sorgfältig reguliert werden müssen.
Der ULN2003 spielt eine Schlüsselrolle bei der Steuerung von Steppermotoren, da der hohe Strom und die einfache Vernetzung mit Mikrocontrollern verarbeitet werden können.Bei der Verbindung mit dem PIC16F877A werden die unteren Portd -Bits verwendet, um den Schrittmotor zu steuern.Diese Konfiguration bietet eine genaue Schrittkontrolle, um eine genaue Bewegung und Positionierung sicherzustellen.
Die Verwendung des ULN2003 in Motor Control Setups ist in realen Anwendungen sehr zuverlässig.Es hilft, Probleme wie verpasste Schritte oder eine falsche Positionierung zu minimieren und die Gesamtleistung zu verbessern.Eine regelmäßige Wartung und Kalibrierung basierend auf Nutzungsdaten kann die Motorfunktion weiter optimieren und die langfristige Stabilität und einen präzisen Betrieb sicherstellen.
Einstellen von Schrittmotordrehzahl
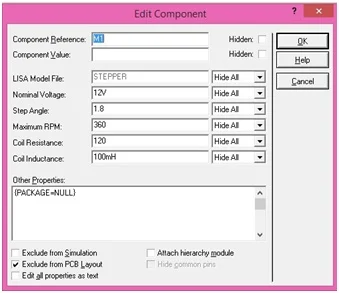
Die Motordrehzahl von Stepper kann mithilfe der Proteus -Simulationssoftware genau geändert werden.Durch den Zugriff auf die Einstellungen des Motors über "Eigenschaften bearbeiten" können Anpassungen an Parameter wie die Anzahl der Schritte und der Schrittwinkel vorgenommen werden.Beispielsweise spaltet ein 200-Stufen-Motor eine vollständige Drehung (360 °) in 200 Schritte auf, wodurch jeder Schritt 1,8 ° wird.Das Ändern dieser Einstellungen in Proteus wird während der Simulation dynamisch reflektiert.
In der Praxis werden Stepper -Motoren häufig in Branchen eingesetzt, in denen eine präzise Kontrolle der Bewegung von entscheidender Bedeutung ist, z. B. in CNC -Maschinen und Robotik.Einstellen des Schrittwinkels und der Anzahl der Schritte fein abgestimmt den Motor, um die genaue Bewegung zu erreichen, die für bestimmte Aufgaben erforderlich ist.
Durch die Veränderung von Schrittmotorparametern wirkt sich die Leistungseigenschaften wie Drehmoment und Auflösung aus.Zum Beispiel erhöht die Erhöhung der Anzahl der Schritte im Allgemeinen die Auflösung, kann sich jedoch auf das Drehmoment und die Reaktionszeit auswirken.Das Verständnis dieser Kompromisse durch Simulation hilft bei fundierten Entscheidungen.
Eine differenzierte Perspektive zeigt, dass iterative Anpassungen, gefolgt von praktischen Versuchen zu einem robusteren Motordesign.Es ist entscheidend, dass digitale Simulationen die Ergebnisse der realen Welt genau widerspiegeln.Die Nuancen, einen Schrittmotor zu konfigurieren, liegen tatsächlich darin, ein Gleichgewicht zwischen theoretischer Präzision und praktischer Machbarkeit zu treffen.
Programmieren eines Schrittmotors mit PIC16F877A
In diesem Abschnitt werden ein Schrittmotor mit dem PIC16F877A -Mikrocontroller programmiert, wobei verschiedene Fahrmodi erläutert und praktische Anleitungen für eine effektive Implementierung bereitgestellt werden.
Hier ist ein grundlegender Beispielcode zum Nachweis von Schrittmotorsteuerung mit dem vollständigen Antriebsmodus:
void main ()
{
TRISD = 0B00000000;// Portd als Ausgabe einstellen
Portd = 0b11111111;// Portd initialisieren
Tun
{
Portd = 0b00000011;// zwei Phasen gleichzeitig anregen
Delay_ms (500);// 0,5-Sekunden-Verzögerung
Portd = 0b00000110;
Delay_ms (500);
Portd = 0B00001100;
Delay_ms (500);
Portd = 0B00001001;
Delay_ms (500);
} während (1);// unbegrenzt Schleifen
}
In diesem Code ist der PortD des PIC16F877A als Ausgabebericht für den Stufe des Schritts über den ULN2003 -Treiber konfiguriert.Die Folge der Befehle engagiert jeweils zwei Phasen des Schrittmotors, was für den vollständigen Antriebsmodus charakteristisch ist.Dieser Modus hält den Rotor in einer festen Position mit maximalem Drehmoment, verbraucht jedoch in der Regel mehr Strom.
Der vollständige Antriebsmodus ist nicht der einzige Weg, um Schrittmotoren zu steuern.Wave Drive und Half Drive -Modi bieten Alternativen basierend auf bestimmten Anforderungen.Wellenantrieb energetisiert nur eine Phase zu einer Zeit, was den Stromverbrauch verringert, jedoch zu einem geringeren Drehmoment führt.Half Drive wechselt zwischen einer und zwei Phasen und bietet eine höhere Auflösung und eine glattere Bewegung.
Wählen Sie beim Programmieren von Schrittmotoren den Fahrmodus aus, der Ihren Anforderungen am besten entspricht, unabhängig davon, ob es sich um eine präzise Positionierung, Leistungseffizienz oder ein maximales Drehmoment handelt.
Praktische Anwendungen von Schrittmotoren
Schrittmotoren werden in vielen Branchen weit verbreitet, da sie eine genaue Kontrolle und eine zuverlässige Leistung bieten können.Ihre Vielseitigkeit macht sie für alles geeignet, von Autos und Haushaltsgeräten bis hin zu Industrieautomaten und medizinischen Geräten.
In der Automobilwelt spielen Schrittmotoren eine Schlüsselrolle bei der Steuerung von Systemen wie Gas, Scheinwerfern und Klimaanlagen.Sie helfen dabei, diese Komponenten zu optimieren und sicherzustellen, dass Fahrzeuge reibungslos und effizient laufen.In Büroausrüstung wie Druckern und Fotokopierern handhaben Schrittmotoren auf Aufgaben wie Papierverfügung und Tintenplatzierung.Diese Präzision gewährleistet eine konsistente Druckqualität und einen reibungslosen Betrieb im Laufe der Zeit.
Zu Hause verlassen sich Geräte wie Waschmaschinen und Geschirrspülwerke auf Stepper -Motoren, um den Wasserfluss und die Drum -Rotation zu steuern, um sicherzustellen, dass alles nahtlos funktioniert.In industriellen Umgebungen sind Steppermotoren für den Betrieb von CNC-Maschinen und Roboterarmen von entscheidender Bedeutung, wo sie genau die für die Herstellung hochpräzise benötigten Bewegungen bereitstellen.
Sicherheitssysteme profitieren auch von der zuverlässigen Bewegung von Schrittmotoren.In Geräten wie Überwachungskameras und automatisierten Schlössern ermöglichen Stepper -Motoren eine reibungslose und genaue Positionierung, was für eine effektive Überwachung und Sicherheit von wesentlicher Bedeutung ist.Im Gesundheitswesen werden Schrittmotoren in medizinischen Geräten wie Infusionspumpen und Bildgebungsgeräten verwendet, wo sie die genaue Kontrolle für einen sicheren und genauen Betrieb bieten.
Während sich die Technologie weiterentwickelt, wird erwartet, dass Stepper -Motoren noch mehr Anwendungen in aufstrebenden Bereichen wie Robotik und autonomen Fahrzeugen finden.Ihre fortgesetzte Entwicklung wird wahrscheinlich zu einer noch größeren Präzision und Effizienz führen und ihre Rolle in verschiedenen Branchen erweitern.
Vergleichbare Mikrocontroller -Teile
| Teilenummer | Pic16f877a-i/p | Pic16f77-i/p | Pic16f74-i/p | Pic16f777-i/p |
| Hersteller | Mikrochip -Technologie | Mikrochip -Technologie | Mikrochip -Technologie | Mikrochip -Technologie |
| Paket / Fall | 40 DIP (0,600, 15,24 mm) | 40 DIP (0,600, 15,24 mm) | 40 DIP (0,600, 15,24 mm) | 40 DIP (0,600, 15,24 mm) |
| Anzahl der Stifte | 40 | 40 | 40 | 40 |
| Datenbusbreite | 8 b | 8 b | 8 b | 8 b |
| Anzahl von i/o | 33 | 33 | 33 | 36 |
| Schnittstelle | I2C, SPI, SSP, UART, USAart | I2C, SPI, SSP, UART, USAart | I2C, SPI, SSP, UART, USAart | I2c, spi, uart, usart |
| Speichergröße | 14 kb | 7 kb | 14 kb | 14 kb |
| Versorgungsspannung | 5 v | 5 v | 5 v | 5 v |
| Peripheriegeräte | Braun-Out-Erfassungs-/Reset, POR, PWM, WDT | Braun-Out-Erfassungs-/Reset, POR, PWM, WDT | Braun-Out-Erfassungs-/Reset, POR, PWM, WDT | Braun-Out-Erfassungs-/Reset, POR, PWM, WDT |
| View vergleichen | Pic16f877a-i/p Vs Pic16f77-i/p | Pic16f877a-i/p Vs Pic16f77-i/p | Pic16f877a-i/p Vs Pic16f74-i/p | Pic16f877a-i/p Vs Pic16f777-i/p |
Häufig gestellte Fragen [FAQ]
1. Was verwendet ein Schrittmotor, um mechanische Bewegungen zu erzeugen?
Ein Schrittmotor erzeugt mechanische Bewegungen mit elektrischen Impulsen.
2. Was macht ein Schrittmotor?
Ein Schrittmotor bewegt sich in diskreten Schritten.
3. Wie werden Schrittmotoren gemessen?
Schrittmotoren werden in Grad gemessen.
4. Wie viele Schritte unternimmt ein Schrittmotor?
Ein Schrittmotor bewegt sich nacheinander.
5. Wie viele Anregungsmodi hat ein Schrittmotor?
Ein Schrittmotor hat drei Anregungsmodi.
6. Was ist der einfachste Weg, um einen Schrittmotor zu verbinden?
Der einfachste Weg besteht darin, es mit einem PIC16F877A -Mikrocontroller zu verbinden.
7. Wie viele Eingangsnadeln des ULN2003 sind mit den niedrigsten signifikanten Bits der Portd des Mikrocontrollers verbunden?
Vier Eingangsstifte sind mit den niedrigsten signifikanten Bits des Portd des Mikrocontrollers verbunden
Über uns
ALLELCO LIMITED
Weiterlesen
Schnelle Anfrage
Bitte senden Sie eine Anfrage, wir werden sofort antworten.
Warum den Adesto RM25C64DS-LTAI-B-Speicherchip für Ihr Projekt wählen?
auf 2024/10/10
PC817 Optocoppler: Funktionalität und moderne Anwendungen
auf 2024/10/10
Beliebte Beiträge
-
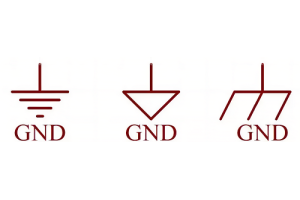
Was ist GND in der Schaltung?
auf 1970/01/1 2838
-

RJ-45-Anschlusshandbuch: RJ-45-Anschluss-Farbcodes, Kabelschemata, R-J45-Anwendungen, RJ-45-Datenblätter
auf 1970/01/1 2409
-

Faseranschlusstypen: SC gegen LC und LC gegen MTP
auf 1970/01/1 2019
-
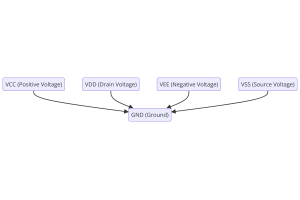
Verständnis der Stromversorgungsspannungen in Elektronik VCC, VDD, VEE, VSS und GND
auf 0400/11/5 1766
-

Vergleich zwischen DB9 und RS232
auf 1970/01/1 1726
-

Was ist eine LR44 -Batterie?
Elektrizität, diese allgegenwärtige Kraft durchdringt leise jeden Aspekt unseres täglichen Lebens, von trivialen Geräten bis hin zu lebensbedrohlichen medizinischen Geräten, es spielt eine stille Rolle.Es ist jedoch keine leichte Aufgabe, diese Energie zu erfassen, insbesondere wie man sie speichert und effizient ausgibt.Vor diesem Hintergrund konzentriert sich dieser Artikel auf eine Art von...auf 1970/01/1 1679
-
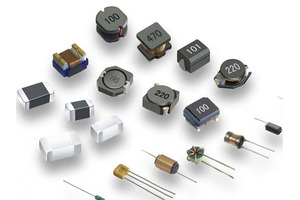
Verständnis der Grundlagen: Induktivitätsresistenz, und Capacitance
Im komplizierten Tanz der Elektrotechnik steht ein Trio grundlegender Elemente im Mittelpunkt: Induktivität, Widerstand und Kapazität.Jeder trägt einzigartige Merkmale, die die dynamischen Rhythmen elektronischer Schaltungen bestimmen.Hier begeben wir uns auf eine Reise, um die Komplexität dieser Komponenten zu entschlüsseln und ihre unterschiedlichen Rollen und praktischen Verwendungen inner...auf 1970/01/1 1621
-

CR2430 Batterie umfassende Anleitung: Spezifikationen, Anwendungen und Vergleich zu CR2032 -Batterien
Was ist CR2430 -Batterie?Vorteile von CR2430 -BatterienNormCR2430 BatterieanwendungenCR2430 ÄquivalentCR2430 gegen CR2032Batterie CR2430 GrößeWorauf Sie beim Kauf des CR2430 und den Äquivalenten suchen solltenDatenblatt PDFHäufig gestellte Fragen Batterien sind das Herz von kleinen elektronischen Geräten.Unter den vielen verfügbaren Arten spielen Münzzellen eine entscheidende Rolle, die h...auf 1970/01/1 1495
-

CR2450 gegen CR2032: Kann der Akku stattdessen verwendet werden?
Lithium -Manganbatterien haben einige Ähnlichkeiten mit anderen Lithiumbatterien.Hohe Energiedichte und langes Lebensdauer sind die Eigenschaften, die sie gemeinsam haben.Diese Art von Batterie hat aufgrund ihrer einzigartigen Sicherheit das Vertrauen und die Gunst vieler Verbraucher gewonnen.Teure Tech -Geräte?Kleine Geräte in unseren Häusern?Schauen Sie sich um und Sie werden sie überall se...auf 1970/01/1 1471
-
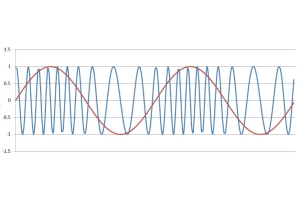
Was ist RF und warum benutzen wir es?
Die Funkfrequenztechnologie (RF) ist ein wesentlicher Bestandteil der modernen drahtlosen Kommunikation und ermöglicht die Datenübertragung über große Strecken ohne physische Verbindungen.Dieser Artikel befasst sich mit den Grundlagen von RF und erklärt, wie die elektromagnetische Strahlung (EMR) die HF -Kommunikation ermöglicht.Wir werden die Prinzipien von EMR, die Schöpfung und Kontrolle...auf 1970/01/1 1454
Heiße Teilenummer
-

144899
Brady Corporation
B302 10X14 ANSI RED,BLK,YEL/WHTC
TJA1441ATK/0Z
NXP USA Inc.
HIGH-SPEED CAN TRANSCEIVER WITH
G3VM-21LR10
Omron Electronics Inc-EMC Div
SSR RELAY SPST-NO 200MA 0-20V
FSA2866UMX
onsemi
IC ANALOG SWITCH 20UMLP
MAX4105ESA
Analog Devices Inc./Maxim Integrated
IC VOLTAGE FEEDBACK 1 CIRC 8SOIC
1206GC331KAT9A
KYOCERA AVX
CAP CER 330PF 2KV X7R 1206
PAH200S48-24/V
TDK-Lambda Americas Inc
DC DC CONVERTER 24V 200W
ISL95338HRTZ-T
Renesas Electronics America Inc
IC REG NOTEBOOK BI-DIR VR 4X4 T
PM8311A-FEI
Microchip Technology
IC TELECOM INTERFACE
C3216X8R1E105M160AA
TDK Corporation
CAP CER 1UF 25V X8R 1206
LT1360CS8#TRPBF
Analog Devices Inc.
IC VOLTAGE FEEDBACK 1 CIRC 8SO
CTX01-18136-R
Eaton - Electronics Division
FIXED IND 2.8UH
MAX203ECWP
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 2/2 20SOIC
GRM1555C1H7R0CA01J
Murata Electronics
CAP CER 7PF 50V C0G/NP0 0402
CY24115SXC-2
Infineon Technologies
IC CLOCK GENERATOR 8SOIC
CAT25040P
onsemi
IC EEPROM 4KBIT SPI 10MHZ 8DIP
IRLR110
Vishay Siliconix
MOSFET N-CH 100V 4.3A DPAK
LQP03TG6N8J02D
Murata Electronics
FIXED IND 6.8NH 200MA 1.15OHM SM -

MAX5929CEEG+T
Analog Devices Inc./Maxim Integrated
IC HOT SWAP CTRLR GP 24QSOP
UCLAMP3311Z.TFT
Semtech Corporation
TVS DIODE 3.3V 7.5V SLP0603P2X3A
AD7940BRMZ-REEL7
Analog Devices Inc.
IC ADC 14BIT SAR 8MSOP
MPSW42
onsemi
TRANS NPN 300V 0.5A TO92
DFLT6V5A-7
Diodes Incorporated
TVS DIODE 6.5V 11.2V POWERDI 123
EP20K200RC208-3
Intel
IC FPGA 144 I/O 208RQFP
C3225JB2E224K200AA
TDK Corporation
CAP CER 0.22UF 250V JB 1210
EP2A15F672C8
Intel
IC FPGA 492 I/O 672FBGA
LT1185CQ#TRPBF
Analog Devices Inc.
IC REG LIN POS/NEG ADJ 3A 5DDPAK
CC0603DRNPO9BN8R2
YAGEO
CAP CER 8.2PF 50V C0G/NPO 0603
MCIMX31LDVMN5D
Freescale Semiconductor
I.MX31 32-BIT MPU, ARM1136JF-S C
WL1835MODGBMOCT
Texas Instruments
RF TXRX MOD WIFI SURFACE MOUNT
CL31C122JBCNNNC
Samsung Electro-Mechanics
CAP CER 1200PF 50V C0G/NP0 1206
1716120000
Weidmüller
TERM BLOCK 2POS 45DEG 5.08MM PCB
AD976ARZ
Analog Devices Inc.
IC ADC 16BIT SAR 28SOIC
AO3422L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 55V 2.1A SOT23-3
RF2637TR7
RFMD
IC RF AMP PCS 12MHZ-385MHZ 8MSOP
LT6205IS5#TRPBF
Analog Devices Inc.
IC AMP VOLTAGE FEEDBACK TSOT23-5 -

FOD2743B
onsemi
OPTOISOLATOR 5KV TRANSISTOR 8DIP
SN74F38D
Texas Instruments
IC GATE NAND OPEN 4CH 2IN 14SOIC
VSC7161XHK
Analog Devices Inc./Maxim Integrated
10 PORT SAS EXPANDER AT 1.5GBPS
CL10B102KB8WPNC
Samsung Electro-Mechanics
CAP CER 1000PF 50V X7R 0603
SN74ALS30ANSR
Texas Instruments
IC GATE NAND 1CH 8-INP 14SOP
AD8569ARM-REEL
Analog Devices Inc.
IC BUFFER AMP QUAD R-R 10-MSOP
ADA4941-1YCPZ-R7
Analog Devices Inc.
IC ADC DRIVER 8LFCSP
MAX16956AUBB/V+T
Analog Devices Inc./Maxim Integrated
IC REG BUCK 3.3V 300MA 10UMAX
CC0805ZRY5V6BB225
YAGEO
CAP CER 2.2UF 10V Y5V 0805
MUN2236T1
onsemi
TRANS PREBIAS NPN 338MW SC59
GRM21AR72D332KW01D
Murata Electronics
CAP CER 3300PF 200V X7R 0805
S9S12P96J0MLH
NXP USA Inc.
IC MCU 16BIT 96KB FLASH 64LQFP
TC6320K6-G
Microchip Technology
MOSFET N/P-CH 200V 8VDFN
S-817A33APF-CUWTFG
ABLIC Inc.
IC REG LINEAR 3.3V 50MA SNT4A
GRM155C80G684KE19J
Murata Electronics
CAP CER 0.68UF 4V X6S 0402
S8M02600B
Diodes Incorporated
THYRISTOR TO220AB TUBE 50PCS
S-1206B18-M3T1G
ABLIC Inc.
IC REG LINEAR 1.8V 250MA SOT23-3
XCV50-5FG256C
AMD
IC FPGA 176 I/O 256FBGA