L298N -Motorfahrer: Merkmale, Schaltpläne und Anwendungen
Katalog
Einführung in L298N
L298n ist eine vertikale Paketversion von L298.Es handelt sich um einen Treiberchip mit Doppelkanal-Treiber, der Hochspannung und hohen Strom akzeptieren kann.Die Arbeitsspannung kann 46 V erreichen und sein maximaler Ausgangsstrom beträgt 4a.Darüber hinaus verfügt L298N über zwei Aktivierungsanschlüsse.Mit diesen Steuerklemmen kann der Arbeitsmodus der Schaltung durch Anschließen und Stecker des Eingangsspiegels dynamisch eingestellt werden, ohne vom Eingangssignal gestört zu werden.Der L298N ist mit einem logischen Leistungseingang ausgestattet, wodurch der interne Logikkreisanteil bei niedriger Spannung arbeiten kann.Gleichzeitig kann es auch eine Logikspannung von 5 V extern ausgeben.Um eine Beschädigung des Spannungsstabilisierungschips zu vermeiden, wird bei Verwendung einer Antriebsspannung über 12 V dringend empfohlen, eine externe 5 -V -Schnittstelle für die unabhängige Stromversorgung zu verwenden.
L298N steuert den E/A -Eingangsanschluss am Hauptsteuerchip und stellt die Ausgangsspannung direkt durch die Stromversorgung ein, um die Vorwärts-, Rückwärts- und Stopp des Motors zu realisieren.Normalerweise kann L298N Relais (vier Wege), Magnetventile, Magnetventile, zwei DC-Motoren und einen Steppermotor (zweiphasige oder vierphasige) direkt treiben.
Alternativen und Äquivalente:
• E-L298n
• L298HN
• LM18298t
Funktionale Merkmale von L298N
Logische Eingangskompatibilität: Die logische Eingabe von L298N ist mit TTL, CMOs und anderen Logikniveaus kompatibel.
Überhitzungsschutz: L298N hat eine Überhitzungsschutzfunktion.Wenn die Chip -Temperatur zu hoch ist, wird die Ausgabe automatisch getrennt.
Eingebaute kostenlose Polaritätsdiode: L298N verfügt über eine integrierte kostenlose Polaritätsdiode, die zum Bremsen von DC-Motoren verwendet werden kann.
Großer Stromausgang: L298N kann einen großen Ausgangsstrom liefern und ist für einige Anwendungen geeignet, die einen großen Antriebsstrom erfordern.
Doppelh-Brücken-Struktur: L298N integriert eine doppelte H-Brücken-Struktur, die die Lenkung und Geschwindigkeit von zwei DC-Motoren oder Stepper-Motoren steuern kann.
L298N -Schaltplan
Das Schaltplan von L298N lautet wie folgt:
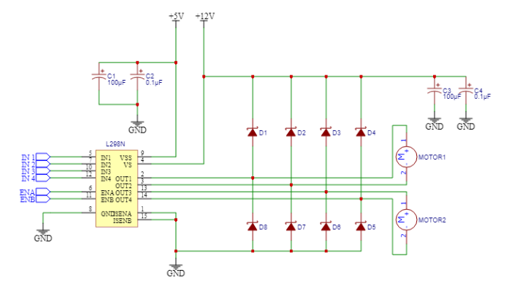
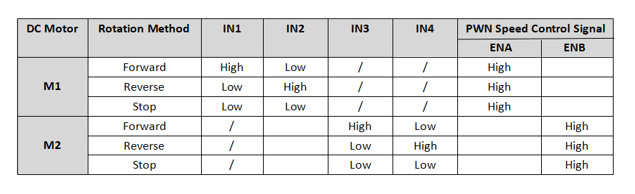
Out1, Out2 und Out3, Out4 sind an Motor1, Motor2 angeschlossen;IN1, IN2, IN3, IN4 PINs vom Mikrocontroller, um auf die Steuerung zuzugreifen, um den Motor vorwärts und umgekehrt zu steuern;ENA, ENB an die Kontrolle des Enable -Anschlusss angeschlossen, um die Geschwindigkeit des Motors zu steuern.Das L298N -Kontroll -Logik -Beziehungsdiagramm lautet wie folgt:
In Bezug auf die motorische Geschwindigkeitsregulierung haben wir die PWM -Geschwindigkeitsregulierungsmethode angewendet.Das Prinzip liegt in der Erkennung der Geschwindigkeitsregulation, indem die Leitungszeit t des Schaltrohrs in einem Zyklus gesteuert wird.Die durchschnittliche Spannung u über den Motor während eines vollständigen Zyklus t kann als U = VCC × (T/T) = A × VCC ausgedrückt werden.Wobei a = t/t als Arbeitszyklus bekannt ist und VCC die Versorgungsspannung darstellt.Die Geschwindigkeit des Motors ist proportional zur Spannung über den Motor, während die Spannung über den Motor proportional zum Arbeitszyklus der Kontrollwellenform ist.Daher besteht eine proportionale Beziehung zwischen der Geschwindigkeit des Motors und dem Arbeitszyklus: Je höher der Arbeitszyklus, desto schneller die Geschwindigkeit des Motors.
Kontrollmethode von L298N
Bei der Verwendung von L298N müssen wir die Steuersignale in 1, IN2, IN3 und IN4 eingeben, um die Vorwärts- und Rückwärtsdrehung und die Geschwindigkeit des Motors zu steuern.Hier sind mehrere Kontrollmethoden:
PWM -Steuermodus
Der PWM -Modus kann die Geschwindigkeit des Motors effektiv steuern.Bei Verwendung des PWM -Modus müssen wir die beiden Stifte EN1 und EN2 verwenden, um die Geschwindigkeit des Motors anzupassen.Insbesondere wird der Motor normal funktioniert, wenn sich die EN1- und EN2 -Stifte auf hohem Niveau haben.Wenn sie auf niedrigem Niveau sind, hört der Motor auf zu drehen.
Einweg-Steuermodus
Wenn IN1, IN2, IN3 und IN4 gleichzeitig ein hohes Niveau sind, dreht sich der Motor nach vorne.Wenn zwei Eingangsanschlüsse ein hohes Niveau sind und die beiden anderen Eingangsanschlüsse niedrig sind, dreht sich der Motor umgekehrt.
Bidirektionaler Steuermodus
Bei der Verwendung des bidirektionalen Steuermodus sind IN1 und IN2 für die Steuerung des Motors 1 verantwortlich, während IN3 und IN4 für die Steuerung des Motors 2 verantwortlich sind. Insbesondere, wenn IN1 ein hohes Niveau und IN2 ist, dreht sich Motor 1 vorwärts.Umgekehrt dreht sich Motor 1 umgekehrt umgekehrt.Ebenso gilt die Kontrolllogik von IN3 und IN4 auch für die Vorwärts- und Rückwärtsrotationskontrolle des Motors 2.
Pin -Diagramm und Funktionen von L298N
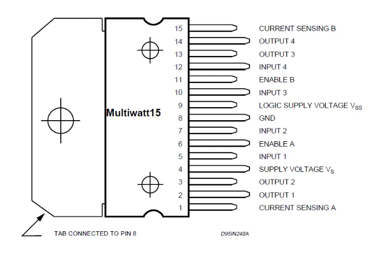
Power Pin
VS: Versorgungsspannungseingang (bis zu 46 V)
GND: Erdungsnadel
Logic Control Pin
IN1, IN2: Wird zur Steuerung der Drehrichtung des Motors 1 verwendet
IN3, IN4: Wird verwendet, um die Drehrichtung von Motor 2 zu steuern
Motorkontrollstift:
Out1, Out2: Wird verwendet, um die Richtung des Motors zu kontrollieren 1
Out3, Out4: Wird verwendet, um die Richtung des Motors 2 zu steuern 2
ENA: Pin aktivieren, verwendet, um die Geschwindigkeit des Motors 1 zu steuern 1
ENB: Der Stift aktivieren und die Geschwindigkeit von Motor 2 steuern
Wie benutze ich L298N?
Verbinden Sie die Stromversorgung: Die Stromversorgung des L298N -Treibermoduls sollte im Bereich von 12 V auf 35 V gehalten werden.In praktischen Anwendungen müssen wir möglicherweise auch die Stromversorgung filtern, um die Stabilität der Stromversorgung zu gewährleisten.
Schließen Sie die Motoren an: Wir verbinden die beiden Motoren über den Treiber mit den Ausgangsstiften des L298N, und die Steuerung wird direkt über den L298N in den Motor eingegeben.
Steuerelement L298N: Wir verwenden den Steueranschluss (aktivieren, Steuerstift), um die L298N zu steuern.Wir müssen den Status des Port- und Steuer -Pin aktivieren, wenn Sie Werte zuweisen.Diese Status bestimmen den Niveaustatus der L298N -Ausgabe.Durch das Ändern dieser Zustände können wir die vorwärts- und umgekehrte Drehung und Geschwindigkeit des Motors effektiv steuern.
Wie benutzt ich PWM, um die Geschwindigkeit des Motors zu regulieren?
Wenn wir PWM verwenden möchten, um die Geschwindigkeit des Motors zu regulieren, haben wir zwei Kabelmethoden:
Kabelmethode eins (empfohlen):
Wir entfernen die Jumperkappe zwischen Kanal -Enable und 5 V, verbinden den Aktivierungsstift mit dem PWM -Stift von Arduino und verbinden Stifte 1 und 2 mit den beiden normalen Arduino -Stiften.Auf diese Weise können wir den Schalter des Kanals durch den PWM -Pin steuern, um die Geschwindigkeit des Motors anzupassen.Durch die Steuerung des Ebenenstatus der Stifte 1 und 2 können wir die Drehrichtung des Motors steuern.Diese Verdrahtungsweise erfordert nur die Verwendung eines PWM -Pin pro Kanal, sondern zwei normale Stifte.Daher müssen wir in praktischen Anwendungen auf der Grundlage der Anzahl der auf dem Arduino verfügbaren Stifte abwägen und auswählen.
Kabelmethode zwei (nicht empfohlen):
Wir entfernen den Pullover zwischen Channel Enable und 5 V nicht, sodass der Kanal kontinuierlich geöffnet bleibt.Dann haben wir die Pins 1 und 2 mit den beiden PWM -Schnittstellen von Arduino angeschlossen.Durch Steuern der Ausgänge, die diesen beiden Stiften entsprechen, können wir die Motordrehrichtung und -geschwindigkeit steuern.Offensichtlich wird diese Verdrahtungsmethode mehr PWM -Stifte einnehmen, da jeder Kanal zwei PWM -Stifte benötigt, um zu kontrollieren.Diese Methode belegt jedoch keine gemeinsamen Stifte.Daher empfehlen wir nicht, dieses Verdrahtungsschema zu verwenden, wenn die PWM -PIN -Ressourcen eng sind.
Wo wird L298n verwendet?
Elektrofahrzeuge: L298N kann verwendet werden, um die Antriebsmotoren in Elektrofahrzeugen wie Elektrofahrrädern, Rollern usw. zu steuernStabiles Fahren von Elektrofahrrädern.Der Fahrer kann Anweisungen an den L298N übertragen, indem er den Griff oder die Tasten betätigt, wodurch die Ausgabe des Motors gesteuert wird, um den Fahrradantrieb entsprechend den Wünschen des Fahrers zu erstellen.
Automatisierte Industriegeräte: Im Bereich der industriellen Automatisierung kann L298N verwendet werden, um die Motoren verschiedener Industriegeräte wie Förderbänder, Roboterarme, Industrie -Roboter usw. zu steuernDrehwinkel und Drehzahl des Motors, sodass sich der Roboterarm entsprechend einer vorgegebenen Flugbahn bewegen und einen hohen Präzisionsbetrieb erzielen kann.Dies verbessert nicht nur die Produktionseffizienz, sondern reduziert auch die durch Betriebsfehler verursachten Produktionsverluste.
Robotertechnologie: L298N wird häufig in Roboterprojekten verwendet, um den Antriebsmotor zu steuern, um die Bewegung und Wirkung des Roboters zu realisieren.Industrieboter müssen häufig schwere Ladung und hohe Vorbereitungsarbeiten durchführen und äußerst hohe Anforderungen an Antriebsmotoren haben.L298N bietet leistungsstarke Stromunterstützung für Industrie -Roboter mit hervorragender Fahrkapazität und Stabilität.Unabhängig davon, ob es sich um Handhabung, Montage oder Inspektion handelt, kann L298N sicherstellen, dass Industrieboter Aufgaben genau und effizient erledigen.
Smart Home: In Smart Home Systems kann L298N verwendet werden, um die Motoren von Jalousien, Vorhängen, Türen und anderen Geräten zu steuern, um eine automatische Steuerung zu erreichen.Durch die Kombination mit Sensoren können Hausgeräte automatisch entsprechend Beleuchtung, Temperatur und anderen Bedingungen eingestellt werden.
Solar -Tracking -System: In Solarsystemen kann L298N verwendet werden, um den Neigungswinkel von Solarmodulen zur Implementierung eines Solar -Tracking -Systems zu steuern.Durch die Kontrolle von L298N kann das Solar -Tracking -System die Positionsänderungen in Echtzeit erfassen und den Neigungswinkel der Sonnenkollektoren entsprechend einstellen.Dieser dynamische Anpassungsprozess stellt sicher, dass die Sonnenkollektoren immer den optimalen Winkel der Sonne aufrechterhalten und so die Effizienz der Energieerfassung der Sonnenkollektoren verbessern.
Häufig gestellte Fragen [FAQ]
1. Kann L298N -Steuergeschwindigkeit?
Der L298N ist ein Doppelh-Brücken-Motorrad-Treiber, der gleichzeitig die Geschwindigkeits- und Richtungssteuerung von zwei DC-Motoren ermöglicht.
2. Warum funktioniert mein L298n nicht?
Es muss über 4,5 V für den korrekten Betrieb des L298 liegen.2. Sie werden vielleicht 2,5 V im L298 verlieren.Vielleicht ist nicht genug Spannung übrig, um den Motor zu betreiben.
3. Was ist der L298N?
Der L298N-Motor-Treiber ist ein Controller, der eine H-Brücke verwendet, um die Richtung der Motoren und PWM leicht zu steuern, um die Geschwindigkeit zu steuern.Mit diesem Modul können Sie in beiden Richtungen unabhängig voneinander zwei Motoren von bis zu 2A verwalten.Die Versorgungsbereich kann zwischen 5 V und 35 V variieren, genug für die meisten DC -Motorprojekte.
4. Können wir 4 Motoren mit L298N anschließen?
Die Antwort lautet Ja und Nein. Es hängt davon ab, wie Sie den L298n -Motorfahrer verwenden.Der L298N, der ursprünglich zur Steuerung von zwei DC -Motoren oder einem Schrittmotor ausgelegt ist.Wenn Sie jedoch nicht möchten, dass jeder Motor rückwärts dreht, können Sie jede Seite des L298N -Treibers zwei DC -Motoren und insgesamt 4 Motoren steuern.