MPU-6050 in Aktion: Praktische Anleitung zu Setup, Konfiguration und Rauschverwaltung
Katalog
Einführung in MPU-6050
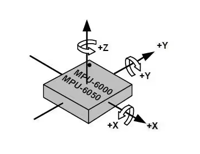
MPU-6050 ist die weltweit erste integrierte 6-Achsen-Bewegungsverarbeitungskomponente, die ein 3-Achsen-Gyroskop, einen 3-Achsen-Beschleunigungsmesser und einen skalierbaren digitalen Bewegungsprozessor (DMP) integriert.Der Zweck der Verwendung ist es, den Neigungswinkel des zu messenden Objekts (wie ein Quadcopter, ein Balancing Car) auf den Achsen x, y und z zu erhalten, dh den Stellwinkel, den Rollwinkel und der Gierwinkel.Wir lesen die sechs Daten des MPU-6050 (Drei-Achsen-Beschleunigungs-AD-Wert und Drei-Achsen-Winkelgeschwindigkeits-AD-Wert) über die I2C-Schnittstelle.Nach der Verarbeitung der Haltungfusion können die Tonhöhe, die Rollen- und Gierwinkel berechnet werden.Als Richtungsreferenz für Messwerte ist die Definition der Sensorkoordinatenrichtung wie in der folgenden Abbildung gezeigt, die dem Prinzip des rechtshändigen Koordinatensystems folgt (dh der rechte Daumen zeigt auf die positive Richtung des X-Achse, der Indexfinger zeigt auf die positive Richtung der y-Achse und der Mittelfinger zeigt auf die positive Richtung der Z-Achse).
Mit seinem dedizierten I2C-Sensorbus kann der MPU-6050 Eingaben direkt von einem externen 3-Achsen-Kompass erhalten, was eine vollständige 9-Achsen-MotionFusion ™-Ausgabe bietet.Es beseitigt das Diskrepanzproblem zwischen dem kombinierten Gyroskop und dem Beschleunigungszeitachel und reduziert den Verpackungsraum im Vergleich zu mehrkomponenten Lösungen signifikant.Wenn der MPU-60x0 an ein Drei-Achsen-Magnetometer angeschlossen ist, kann er seinen Haupt-I2C- oder SPI-Anschluss mit 9-Achsen-Bewegungsfusionsausgangsleistung für die 9-Achsen-Fusionsausgabe bereitstellen (beachten Sie, dass der SPI-Anschluss nur auf dem MPU-6000 verfügbar ist).
Alternativen und Äquivalente
• MPU-3300
• MPU-6000
• MPU-6500
Hersteller von MPU-6050
Der Hersteller von MPU-6050 ist TDK.Nachdem die beiden Gründer von TDK, Dr. Yogoro Kato und Takei Takei, Ferrite in Tokio erfunden hatten, gründeten sie Tokyo Denkikagaku Kogyo K.K.1935. Als globale Marke für Elektronikindustrie hat TDK immer eine dominante Position in den Bereichen elektronische Rohstoffe und elektronische Komponenten beibehalten.Die umfassenden und innovationsgetriebenen Produktportfolio-Abdeckungen von TDK passive Komponenten wie Keramikkondensatoren, Aluminiumelektrolytkondensatoren, Filmkondensatoren, magnetische Produkte, Hochfrequenzkomponenten, piezoelektrische und Schutzgeräte sowie Sensoren und Sensorsysteme (Temperatur- und Druck-Magnet- und MEMS -Sensoren) usw. Darüber hinaus bietet TDK auch Stromversorgungs- und Energiegeräte, magnetische Köpfe und andere Produkte.Zu den Produktmarken gehören TDK, Epcos, InvenSense, Micronas, Tronics und TDK-Lambda.
Interne Blockdiagramm von MPU-6050
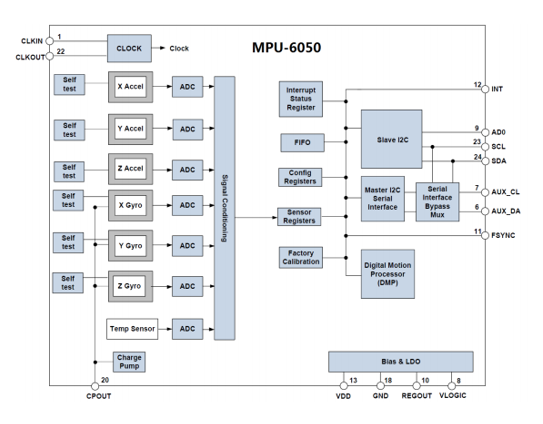
Unter ihnen sind SCL und SDA die mit der MCU verbundenen IIC-Schnittstellen, und die MCU steuert die MPU-6050 über diese IIC-Schnittstelle.Es gibt auch eine IIC -Schnittstelle, nämlich AUX_CL und AUX_DA.Diese Schnittstelle kann verwendet werden, um externe Slave-Geräte wie magnetische Sensoren zu verbinden, um einen neunachsigen Sensor zu bilden.Vlogic ist die IO -Portspannung.Dieser Stift kann mindestens 1,8 V unterstützen.Wir verbinden es normalerweise direkt mit VDD.AD0 ist der Adresskontrollstift der Sklaven -IIC -Schnittstelle (mit der MCU verbunden).Dieser PIN steuert das niedrigste Bit der IIC -Adresse.Wenn es mit GND verbunden ist, beträgt die IIC-Adresse von MPU-6050 0x68;Wenn es mit VDD verbunden ist, ist es 0x69.Bitte beachten Sie, dass die Adresse hier nicht das niedrigste Bit der Datenübertragung enthält (das niedrigste Bit wird verwendet, um Lese- und Schreibvorgänge darzustellen).Auf dem MWBalancedStC15 ist AD0 mit GND verbunden, so dass die IIC-Adresse des MPU-6050 0x68 beträgt (ohne das niedrigste Bit).
Initialisieren Sie die IIC -Schnittstelle
MPU-6050 verwendet IIC, um mit STC15 zu kommunizieren. Daher müssen wir zuerst die SDA- und SCL-Datenlinien initialisieren, die mit MPU-6050 verbunden sind.
MPU-6050 zurücksetzen
Dieser Schritt stellt alle Register innerhalb des MPU-6050 wieder auf ihre Standardwerte, die durch das Schreiben von 1 bis Bit 7 des Power Management Register 1 (0x6b) erreicht werden.Nach dem Zurücksetzen wird das Leistungsverwaltungsregister 1 in den Standardwert (0x40) wiederhergestellt, und dieses Register muss anschließend auf 0x00 eingestellt werden, um die MPU-6050 aufzuwecken und es in einen normalen Arbeitszustand zu bringen.
Stellen Sie den Bereich des Winkelgeschwindigkeitssensors (Gyro) und des Beschleunigungssensors des Winkelgeschwindigkeitssensors ein
In diesem Schritt setzen wir den vollständigen Bereich (FSR) der beiden Sensoren über das Gyroscope-Konfigurationsregister (0x1b) bzw. das Beschleunigungssensor-Konfigurationsregister (0x1c).Typischerweise setzen wir den umfassenden Bereich des Gyroskops auf ± 2000dps und den umfassenden Bereich des Beschleunigungsmessers auf ± 2 g.
Stellen Sie andere Parameter ein
Hier müssen wir auch die folgenden Parameter konfigurieren: Unterbrechungen deaktivieren, die Aux I2C-Schnittstelle deaktivieren, FIFO deaktivieren, die Gyroscope-Abtastrate einstellen und den digitalen Tiefpassfilter (DLPF) konfigurieren.Da wir keine Interrupts verwenden, um Daten in diesem Kapitel zu lesen, muss die Interrupt -Funktion ausgeschaltet werden.Gleichzeitig müssen wir diese Schnittstelle auch schließen, da wir die Aux I2C -Schnittstelle nicht verwenden, um andere externe Sensoren zu verbinden.Diese Funktionen können über das Interrupt -Enable -Register (0x38) und das Benutzersteuerregister (0x6a) gesteuert werden.MPU-6050 kann FIFO verwenden, um Sensordaten zu speichern, aber wir haben sie in diesem Kapitel nicht verwendet, sodass alle FIFO-Kanäle geschlossen werden müssen.Dies kann über das FIFO -Enable -Register (0x23) gesteuert werden.Standardmäßig beträgt der Wert dieses Registers 0 (dh FIFO ist deaktiviert), sodass wir den Standardwert direkt verwenden können.Die Abtastrate des Gyroskops wird durch das Abteilungsregister der Stichprobenrate (0x19) gesteuert.Normalerweise setzen wir diese Stichprobenrate auf 50. Die Konfiguration des digitalen Tiefpassfilters (DLPF) wird über das Konfigurationsregister (0x1a) abgeschlossen.Im Allgemeinen setzen wir DLPF auf die Hälfte der Bandbreite, um Datengenauigkeit und Reaktionsgeschwindigkeit auszugleichen.
Konfigurieren Sie die Systemaktuhrenquelle und aktivieren Sie den Winkelgeschwindigkeitssensor und den Beschleunigungssensor
Die Einstellung der Systemaktuhrenquelle hängt vom Stromverwaltungsregister 1 (0x6b) ab, in dem die niedrigsten drei Bits dieses Registers die Auswahl der Taktquelle bestimmen.Standardmäßig werden diese drei Bits auf 0 gesetzt, was bedeutet, dass das System den internen 8 -MHz -RC -Oszillator als Taktquelle verwendet.Um die Taktgenauigkeit zu verbessern, setzen wir sie jedoch häufig auf 1 und wählen das X-Achse-Gyroskop-PLL als Taktquelle aus.Darüber hinaus ist das Ermöglichen des Winkelgeschwindigkeitssensors und des Beschleunigungssensors ein wichtiger Schritt im Initialisierungsprozess.Beide Operationen werden über das Power Management Register 2 (0x6c) implementiert.Stellen Sie einfach das entsprechende Bit auf 0 ein, um den entsprechenden Sensor zu aktivieren.Nach Abschluss der oben genannten Schritte kann der MPU-6050 den normalen Arbeitsstatus eingeben.Diejenigen Register, die nicht speziell festgelegt sind, übernehmen die vom System voreingestellten Standardwerte.
Wie funktioniert die MPU-6050?
Gyrosensor
Der Sensor ist mit einem Gyro im Inneren ausgestattet, der aufgrund des gyroskopischen Effekts immer parallel zur anfänglichen Richtung bleibt.Daher können wir die Richtung und den Drehwinkel berechnen, indem wir die Abweichung des Gyro aus der Anfangsrichtung nachweisen.
Beschleunigungsmessersensor
Ein Beschleunigungsmessersensor ist ein Gerät, das die Beschleunigung messen kann und basiert auf dem Prinzip des piezoelektrischen Effekts.Während der Beschleunigung misst der Sensor die für den Massenblock angewendete Trägheitskraft und berechnet dann den Beschleunigungswert nach dem zweiten Newton -Gesetz.
Digitaler Bewegungsprozessor (DMP)
Das DMP ist ein Datenverarbeitungsmodul im MPU6050-Chip mit einem eingebauten Kalman-Filteralgorithmus zum Erfassen von Daten aus dem Gyroskop- und Beschleunigungsmessersensoren und zur Verarbeitung der Ausgangsquaternionen.Diese Funktion reduziert die Arbeitsbelastung des peripheren Mikroprozessors erheblich und vermeidet den mühsamen Filter- und Datenfusionsprozess.
Anmerkungen:
Quaternions: Quaternions sind einfache Superkomplex -Zahlen.Komplexe Zahlen bestehen aus reellen Zahlen und der imaginären Einheit I, wobei i^2 = -1.
Wo wird MPU-6050 verwendet?
• Spielzeug
• Mobilteil und tragbares Spielen
• Bewegungsbasierte Spielcontroller
• Blurfree ™ -Technologie (für Video/Still -Bildstabilisierung)
• Airsign ™ -Technologie (für Sicherheit/Authentifizierung)
• Instantgesture ™ Ig ™ Gestenerkennung
• tragbare Sensoren für Gesundheit, Fitness und Sport
• Bewegungsfähiger Spiel- und Anwendungsrahmen
• MotionCommand ™ -Technologie (für Kurzschnitte von Gesten)
• Standortbasierte Dienste, Punkte von Interesse und tote Abrechnung
• 3D-Fernbedienungen für mit Internet verbundene DTVs und Set-Top-Boxen, 3D-Mäuse
• Touchanywhere ™ -Technologie (für die Steuerung/Navigation von „No Touch“ UI -Anwendung/Navigation)
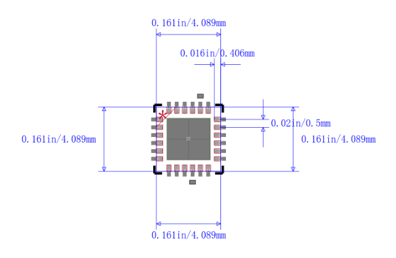
Paket MPU-6050
Wie reduziere ich das Rauschen von MPU-6050?
Wir können die folgenden Möglichkeiten einschlagen, um das Rauschen von MPU-6050 zu verringern:
Verwenden Sie kalibrierte Sensoren: Das Kalibrieren des Beschleunigungsmessers und des Gyroskops des MPU-6050 kann die Verzerrung und den Fehler der Sensoren selbst beseitigen und so den Effekt des Rauschens verringern.Der Kalibrierungsprozess besteht normalerweise aus zwei Stufen: statische Kalibrierung und Bewegungskalibrierung.
Hardwarefilterungsprozess: Das Hinzufügen von Filterkondensatoren in die Stromversorgung der MPU-6050 kann die Auswirkungen von Netzteilrauschen auf den Sensor verringern.Währenddessen sollten wir währenddessen versuchen, MPU-6050 von potenziellen Interferenzquellen wie hochfrequenten Signallinien und Hochleistungskomponenten fernzuhalten.
Software-Filterverarbeitung: Nach dem Sammeln der Rohdaten von MPU-6050 können wir eine Software-Filterverbindung hinzufügen, um die anfänglichen Daten vorzubereiten, um rauschbedingte Interferenzen zu beseitigen.Zu den häufig verwendeten Softwarefiltermethoden gehören die mittlere Filterung, die mediane Filterung, die Kalman -Filterung usw.
Verwenden Sie den internen Tiefpassfilter: MPU-6050 verfügt über einen internen integrierten digitalen Tiefpassfilter, mit dem hochfrequentes Rauschen durch Festlegen der Grenzfrequenz reduziert werden kann.Insbesondere können wir die Grenzfrequenz des digitalen Filters einstellen, indem wir das Konfigurationsregister des MPU-6050 ändern, um das durch A/D-Abtastung verursachte Hochfrequenzrauschen zu beseitigen.
MPU-6050-basierte Bewegungsbahnberechnung
Der MPU-6050 ist ein sechsachsiger Beschleunigungsmesser und ein Gyroskopsensor, mit dem die Bewegung und Haltung von Objekten gemessen werden kann.Die auf MPU-6050 basierende Bewegungs-Trajektorienberechnung kann durch die folgenden Schritte ermittelt werden:
Der erste Schritt besteht darin, die Sensordaten zu lesen.Wir müssen die Beschleunigungsmesser- und Gyroskopdaten der MPU-6050-Sensoren unter Verwendung geeigneter Treiber und Bibliotheksfunktionen lesen.Diese Daten werden in der Regel in einem digitalen Format ausgegeben, sodass einige Umwandlung und Kalibrierungsarbeiten erforderlich sind, um sie in tatsächliche Messungen in physischen Einheiten umzuwandeln.
Der zweite Schritt besteht darin, die Beschleunigung zu berechnen.Zunächst müssen wir die Daten vom Beschleunigungsmesser verarbeiten, um die Beschleunigung des Objekts in jeder Achse abzuleiten.Um die Geschwindigkeit und Verschiebung des Objekts in jeder Achse zu berechnen, müssen wir anschließend die Beschleunigungsdaten integrieren.In diesem Prozess werden häufig numerische Integrationstechniken wie die Euler-Methode oder die Lunger-Kutta-Methode verwendet, um die Genauigkeit der Verschiebungsberechnungen sicherzustellen.
Der dritte Schritt besteht darin, die Winkelgeschwindigkeit zu berechnen.Unter Verwendung von Gyroskopdaten kann die Winkelgeschwindigkeit des Objekts in jeder Achse berechnet werden.Auch diese Daten müssen kalibriert und umgewandelt werden, um die Winkelgeschwindigkeit in tatsächlichen physikalischen Einheiten zu erhalten.
Der vierte Schritt besteht darin, die Rotation zu berechnen.Durch die Integration der Winkelgeschwindigkeitsdaten kann der Drehwinkel des Objekts in jede Achse berechnet werden.Dies kann unter Verwendung von numerischen Integrationstechniken wie der Euler-Methode oder der Longe-Kutta-Methode zur Berechnung des Winkels erfolgen.
Der fünfte Schritt besteht darin, die Daten zusammenzuführen.Wir kombinieren die Daten aus Beschleunigungsmesser und Gyroskopen, um eine vollständige Einstellung und Positionsinformationen des Objekts zu erhalten.Dies kann unter Verwendung von Algorithmen wie Quaternion-basierter Haltung Solver oder Euler-Winkellöser erfolgen.
Der sechste Schritt besteht darin, die Ergebnisse zu visualisieren.Wir konvertieren die Bewegung der berechneten Objektbewegung in einen Satz von Punkten in einem 3D -Koordinatensystem und zeigen sie anhand geeigneter Visualisierungstools für ein intuitiveres Verständnis der Bewegungstrajektorien und der Einstellungsänderungen des Objekts an.
Häufig gestellte Fragen [FAQ]
1. Wie genau ist MPU6050?
Die erworbenen Ergebnisse zeigten eine ausreichende Genauigkeit von weniger als 1 % und Zuverlässigkeit, wodurch die ordnungsgemäße Dimension der Aufzugsschacht und die hohen Standards der Aufzugsindustrie gewährleistet war.
2. Wie lesen Sie Daten von MPU6050?
Um die internen MPU6050 -Register zu lesen, sendet der Master eine Startbedingung, gefolgt von der I2C -Slave -Adresse und einem Schreibbit sowie der Lesung der Registeradresse.
3. Wo wird MPU6050 verwendet?
In tragbaren Gesundheitsverfolgung von Fitness-Tracking-Geräten.In Drohnen und Quadcoptern wird MPU6050 zur Positionsregelung verwendet.Verwendet zur Kontrolle von Roboterarm.Handgestensteuerelemente.
4. Ist MPU6050 eine IMU?
Der MPU6050 IMU-Sensorblock liest Daten aus dem MPU-6050-Sensor, der mit der Hardware verbunden ist.Die Blockausgänge beschleunigen, Winkelrate und Temperatur entlang der Achsen des Sensors.
5. Was ist die Verarbeitung von MPU6050?
Dies ist der Onboard -Prozessor des MPU6050, der die Daten aus dem Beschleunigungsmesser und Gyroskop kombiniert.Der DMP ist der Schlüssel zur Verwendung des MPU6050 und wird später ausführlich erläutert.Wie bei allen Mikroprozessoren benötigt die DMP Firmware, um auszuführen.
Über uns
ALLELCO LIMITED
Weiterlesen
Schnelle Anfrage
Bitte senden Sie eine Anfrage, wir werden sofort antworten.

Eingehende Anleitung zu LM317: Verständnis einstellbarer Spannungsaufsichtsbehörden
auf 2024/09/3
Verständnis des TL431: Ein umfassender Leitfaden für Präzisions -Shunt -Aufsichtsbehörden
auf 2024/09/3
Beliebte Beiträge
-
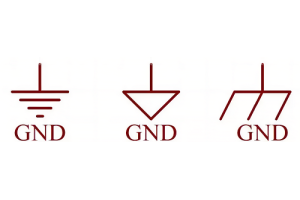
Was ist GND in der Schaltung?
auf 1970/01/1 3108
-

RJ-45-Anschlusshandbuch: RJ-45-Anschluss-Farbcodes, Kabelschemata, R-J45-Anwendungen, RJ-45-Datenblätter
auf 1970/01/1 2674
-
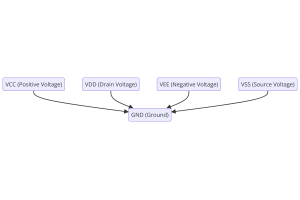
Verständnis der Stromversorgungsspannungen in Elektronik VCC, VDD, VEE, VSS und GND
auf 0400/11/15 2213
-

Faseranschlusstypen: SC gegen LC und LC gegen MTP
auf 1970/01/1 2182
-

Vergleich zwischen DB9 und RS232
auf 1970/01/1 1802
-

Was ist eine LR44 -Batterie?
Elektrizität, diese allgegenwärtige Kraft durchdringt leise jeden Aspekt unseres täglichen Lebens, von trivialen Geräten bis hin zu lebensbedrohlichen medizinischen Geräten, es spielt eine stille Rolle.Es ist jedoch keine leichte Aufgabe, diese Energie zu erfassen, insbesondere wie man sie speichert und effizient ausgibt.Vor diesem Hintergrund konzentriert sich dieser Artikel auf eine Art von...auf 1970/01/1 1774
-
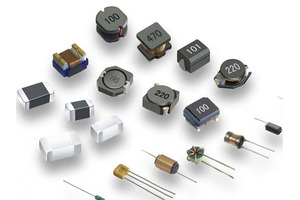
Verständnis der Grundlagen: Induktivitätsresistenz, und Capacitance
Im komplizierten Tanz der Elektrotechnik steht ein Trio grundlegender Elemente im Mittelpunkt: Induktivität, Widerstand und Kapazität.Jeder trägt einzigartige Merkmale, die die dynamischen Rhythmen elektronischer Schaltungen bestimmen.Hier begeben wir uns auf eine Reise, um die Komplexität dieser Komponenten zu entschlüsseln und ihre unterschiedlichen Rollen und praktischen Verwendungen inner...auf 1970/01/1 1728
-

CR2430 Batterie umfassende Anleitung: Spezifikationen, Anwendungen und Vergleich zu CR2032 -Batterien
Was ist CR2430 -Batterie?Vorteile von CR2430 -BatterienNormCR2430 BatterieanwendungenCR2430 ÄquivalentCR2430 gegen CR2032Batterie CR2430 GrößeWorauf Sie beim Kauf des CR2430 und den Äquivalenten suchen solltenDatenblatt PDFHäufig gestellte Fragen Batterien sind das Herz von kleinen elektronischen Geräten.Unter den vielen verfügbaren Arten spielen Münzzellen eine entscheidende Rolle, die h...auf 1970/01/1 1677
-
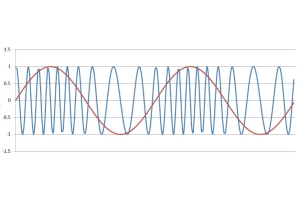
Was ist RF und warum benutzen wir es?
Die Funkfrequenztechnologie (RF) ist ein wesentlicher Bestandteil der modernen drahtlosen Kommunikation und ermöglicht die Datenübertragung über große Strecken ohne physische Verbindungen.Dieser Artikel befasst sich mit den Grundlagen von RF und erklärt, wie die elektromagnetische Strahlung (EMR) die HF -Kommunikation ermöglicht.Wir werden die Prinzipien von EMR, die Schöpfung und Kontrolle...auf 1970/01/1 1670
-
Umfassender Leitfaden für HFE bei Transistoren
Transistoren sind entscheidende Komponenten in modernen elektronischen Geräten, die die Signalverstärkung und -steuerung ermöglichen.Dieser Artikel befasst sich mit dem Wissen um HFE, einschließlich der Auswahl des HFE -Werts eines Transistors, der Suche nach HFE und dem Gewinn verschiedener Transistorenarten.Durch unsere Erforschung von HFE erlangen wir ein tieferes Verständnis dafür, wie T...auf 5600/11/15 1632
Heiße Teilenummer
-

LT6654AMPS6-5#TRPBF
Analog Devices Inc.
IC VREF SERIES 0.05% TSOT23-6
TPSD687M004R0045
KYOCERA AVX
CAP TANT 680UF 20% 4V 2917
X9317WS8IZ
Intersil
X9317 - DIGITAL POTENTIOMETER
LM3411AM5-3.3
Texas Instruments
IC VREF SHUNT 0.5% SOT23-5
SMCJ64A-E3/57T
Vishay General Semiconductor - Diodes Division
TVS DIODE 64VWM 103VC DO214AB
SPK0833LM4H-B
Knowles
MIC MEMS DIGITAL PDM OMNI -26DB
PIC16F726-E/SS
Microchip Technology
IC MCU 8BIT 14KB FLASH 28SSOP
STM32MP153DAA1
STMicroelectronics
MPU WITH ARM DUAL CORTEX-A7 800
ZUS102405
Cosel USA, Inc.
DC DC CONVERTER 5V
74AHC1G125GW
NXP USA Inc.
NOW NEXPERIA 74AHC1G125GW - BUS
PIC18F27Q84-I/SS
Microchip Technology
IC MCU 8BIT 128KB FLASH 28SSOP
C1005X5R1E684K050BC
TDK Corporation
CAP CER 0.68UF 25V X5R 0402
PIC18F4580T-I/PT
Microchip Technology
IC MCU 8BIT 32KB FLASH 44TQFP
SRF0905-652Y
Bourns Inc.
CMC 6.5MH 300MA 2LN 5KOHM SMD
TCAN1051VDRQ1
Texas Instruments
IC TRANSCEIVER HALF 1/1 8SOIC
TC4427VUA
Microchip Technology
IC GATE DRVR LOW-SIDE 8MSOP
BQ24736RGRR
Texas Instruments
PROTOTYPE
GRM1555C1E8R8DA01D
Murata Electronics
CAP CER 8.8PF 25V C0G/NP0 0402 -

MGFS402405
Cosel USA, Inc.
DC DC CONVERTER 5V 40W
R5F21321CDSP#U0
Renesas Electronics America Inc
IC MCU 16BIT 4KB FLASH 20LSSOP
PIC32MX530F128H-V/PT
Microchip Technology
IC MCU 32BIT 128KB FLASH 64TQFP
IXFH15N80Q
IXYS
MOSFET N-CH 800V 15A TO247AD
LTC2050HVCS8#PBF
Analog Devices Inc.
IC OPAMP ZERO-DRIFT 1 CIRC 8SO
DAC7613E/1K
Texas Instruments
IC DAC 12BIT V-OUT 24SSOP
SM8S33A-E3/2D
Vishay General Semiconductor - Diodes Division
TVS DIODE 33VWM 53.3VC DO218AB
2EZ36D5
Microsemi Corporation
DIODE ZENER 36V 2W DO204AL
LQW15AN3N2B00D
Murata Electronics
FIXED IND 3.2NH 500MA 170MOHM SM
VS-300CNQ045PBF
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 45V TO244
DS18B20U
UMW
11 B -55 ~ 125C 1-WIRE DIGITAL,
LP2950ACZ-3.3
onsemi
IC REG LINEAR 3.3V 100MA TO92-3
LQH31HNR39K03L
Murata Electronics
FIXED IND 390NH 330MA 338MOHM SM
NGTB20N120IHRWG
onsemi
IGBT TRENCH/FS 1200V 40A TO247
FH19SC-10S-0.5SH(05)
Hirose Electric Co Ltd
CONN FFC BOTTOM 10POS 0.5MM R/A
TL071CPSR
Texas Instruments
IC OPAMP JFET 1 CIRCUIT 8SO
0805YC331JAT2A
KYOCERA AVX
CAP CER 330PF 16V X7R 0805
STM6524AUABDL6F
STMicroelectronics
IC SUPERVISOR SMART RESET 6UDFN -

VE-211-EW
Vicor Corporation
DC DC CONVERTER 12V 100W
FAN53610AUC30X
Fairchild Semiconductor
SWITCHING REGULATOR, VOLTAGE-MOD
CY2308SXC-1H
Infineon Technologies
IC FANOUT BUFFER 16SOIC
C3216X7R1E685K160AB
TDK Corporation
CAP CER 6.8UF 25V X7R 1206
LTC1451CS8#PBF
Analog Devices Inc.
IC DAC 12BIT V-OUT 8SOIC
1812GC102KATRE
KYOCERA AVX
CAP CER 1000PF 2KV X7R 1812
12065C104MA79A
KYOCERA AVX
CAP CER 0.1UF 50V X7R 1206
BR25L080FJ-WE2
Rohm Semiconductor
IC EEPROM 8KBIT SPI 5MHZ 8SOPJ
C0603C0G1E270K030BA
TDK Corporation
CAP CER 27PF 25V C0G 0201
TLE2037IDR
Texas Instruments
IC OPAMP GP 1 CIRCUIT 8SOIC
C2012C0G1H222J085AA
TDK Corporation
CAP CER 2200PF 50V C0G 0805
DPX105850DT-6019A1
TDK Corporation
RF DIPLEXER 2.45GHZ/5.5GHZ 0402
ISL3153EIBZ
Intersil
IC TRANSCEIVER FULL 1/1 14SOIC
LTST-C150AKT
Lite-On Inc.
LED AMBER CLEAR SMD
SN74LVC1G57DSFR
Texas Instruments
IC CONFIG MULTI-FUNC GATE 6SON
PA4334.223NLT
Pulse Electronics
FIXED IND 22UH 420MA 839MOHM SMD
VI-26B-CX
Vicor Corporation
DC DC CONVERTER 95V 75W
BAT54SQ-7-F
Diodes Incorporated
DIODE SCHOTTKY 30V 200MA SOT23