TB6600HG Stepper Motor Triver: Spezifikationen, Funktionen und Anwendungen
Katalog
TB6600HG Beschreibung

TB6600HG ist ein bipolarer Sinus-Mikroste-Motor-Treiber von PWM Chopper-Typ mit einem Chip.Es kann eine Vorwärts- und Rückwärtsrotationskontrolle durch 2-Phasen-, 1-2-Phasen-, W1-2-Phase-, 2W1-2-Phasen- und 4W1-2-Phasen-Anregungsmodi erreichen.2-Phasen-bipolare Steppermotoren werden ausschließlich durch ein Taktsignal mit niedriger Vibration mit hoher Effizienz angetrieben.
Alternativen und Äquivalente:
• TB6600FG
• L6258ex
Spezifikationen von TB6600HG
• Teilstatus: aktiv
• Verpackung: Tablett
• Paket / Fall: HZIP-25
• Hersteller: Toshiba
• Betriebsangebotsstrom: 4,2 mA
• Betriebsangebotspannung: 2 V bis 5,5 V.
• Lastspannungsbewertung: 8 V bis 42 V.
• Anzahl der Ausgänge: 2 Ausgänge
• PD - Leistungsdissipation: 40 w
• Montagestil: Durch Loch
• Paketlänge/Breite/Höhe: 29.3 mm (max) /4.5 mm/15.7mm
• Produktkategorie: Motor- / Bewegungs- / Zündcontroller und Treiber
Betriebsbedingungen von TB6600HG
(Ta = -30 ° C bis 85 ° C)
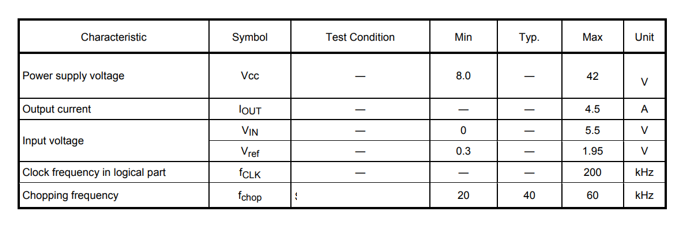
HINWEIS: Zwei VCC -Anschlüsse sollten dieselbe Spannung programmiert werden.Der maximale Strom des Betriebsbereichs kann abhängig von verschiedenen Bedingungen nicht unbedingt durchgeführt werden, da der Ausgangsstrom durch die PD der Leistungsdissipation begrenzt wird.Vermeiden Sie die Verwendung des IC in der Erkrankung, die dazu führt, dass die Temperatur TJ (avg.) = 107 ° C überschreitet.
Die Stromversorgungsspannung von 42 V und der Ausgangsstrom von 4,5 A sind die maximalen Werte des Betriebsbereichs.Bitte entwerfen Sie die Schaltung mit genügend Deration innerhalb dieses Bereichs, indem Sie die Netzteilvariation, den externen Widerstand und die elektrischen Eigenschaften des IC berücksichtigen.Bei der Netzteilspannung von 42 V und dem Ausgangsstrom von 4,5 a wird der IC nicht normal betrieben.
Wie verbinde ich TB6600HG mit dem Steuerungssystem?
Stromverbindung: Stellen Sie zunächst sicher, dass TB6600HG eine angemessene Stromversorgung bereitstellt.Bei der Leistung von TB6600HG müssen Sie normalerweise zwei Stifte anschließen: VCC (positive Stromversorgung) und GND (Erdungsdraht).Der VCC -Pin ist für die Bereitstellung der zum Antrieb des Chips erforderlichen Spannung verantwortlich, während der GND -Pin als Referenz -Bodenniveau dient.Wir müssen sicherstellen, dass die Stromversorgung stabil ist und die Spezifikationen des TB6600HG erfüllt.
Signalverbindung: Gemäß den spezifischen Anforderungen des Steuerungssystems müssen wir das Steuersignal an den entsprechenden Pin des TB6600HG -Treiberchips anschließen.Diese Kontrollsignale umfassen normalerweise Richtungssteuersignale und Stiefpulssignale usw., die für die Anweisung verantwortlich sind, wie der Motor wirkt, einschließlich der Drehrichtung und der Drehzahl.
Motorverbindung: Wir müssen besonders vorsichtig sein, wenn wir den Motor mit dem TB6600HG -Treiberchip anschließen.Die beiden Drähte des Motors, normalerweise rot und schwarz, repräsentieren die positiven und negativen Pole des Motors.Der rote Kabel verbindet normalerweise mit dem positiven Anschluss des Motors, während der schwarze Kabel mit dem negativen Anschluss verbunden ist.
Feedback -Verbindung (optional): Wenn ein Encoder für die Rückkopplungsregelung verwendet wird, müssen wir auch das Ausgangssignal des Encoders an das Steuerungssystem anschließen.Dies enthält typischerweise die Ausgänge von Phase A, Phase B und Phase Z (falls verfügbar).
Erdung: Wir müssen sicherstellen, dass der gemeinsame Erdungsdraht aller Geräte korrekt angeschlossen ist, um Störungen und Beschädigungen zu vermeiden.
Initialisierungseinstellungen: Nach Abschluss der Verbindung müssen wir die Einstellungen des TB6600HG initialisieren, um sicherzustellen, dass sie korrekt funktioniert.Dies kann das Einstellen aktueller Grenzwerte, Schrittmodi usw. umfassen.
TB6600HG -Produktfunktionen
• Einen vergrößerten Kühler für eine gute Wärmeabteilung annehmen
• Auf der Rückseite des Board
• Mit Ausgangskurzschlussschutzfunktion, sorgenfreie Verwendung
• Übernehmen Sie eine optische Hochgeschwindigkeitskopplung von 6N137, um eine hohe Geschwindigkeit ohne Synchronisationsverlust sicherzustellen
• Der Ausgangsstrom ist schrittlos einstellbar, um Ihre verschiedenen Anwendungsanforderungen zu erfüllen
• Mit dem gemeinsamen Anoden -Eingangsmodus gibt es zwei Eingangsanschlüsse, sodass die Verkabelung bequemer wird
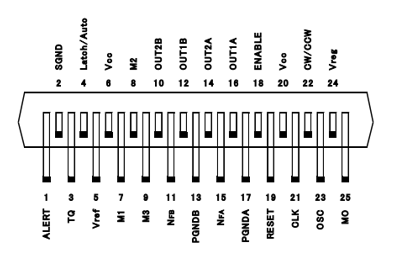
PIN -Konfiguration von TB6600HG
Funktionsbeschreibung von TB6600HG
Anregungseinstellungen
Der Anregungsmodus kann aus den folgenden acht Modi unter Verwendung der M1-, M2- und M3 -Eingänge ausgewählt werden.Wenn M1-, M2- oder M3 -Eingänge während des Motorbetriebs verschoben werden, stellt ein neuer Anregungsmodus aus dem Anfangsmodus aus, was möglicherweise die Kontinuität der Ausgangsstromwellenform stört.
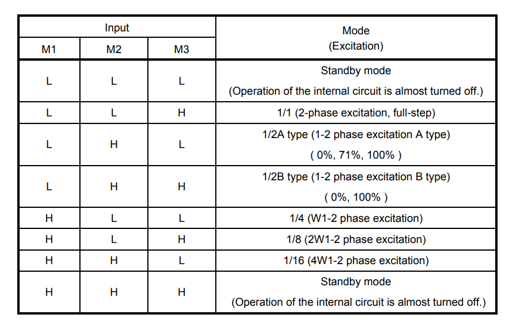
Hinweis: Um den aufregenden Modus durch Ändern von M1, M2 und M3 zu ändern, stellen Sie sicher, dass M1 = M2 = M3 = L oder M1 = M2 = M3 = H.
Standby -Modus
Der Betriebsmodus wechselt in den Standby -Modus unter der Bedingung M1 = M2 = M3 = L oder M1 = M2 = M3 = H. Der Stromverbrauch wird minimiert, indem alle Vorgänge ausgeschaltet werden, außer dem Schutz des Betriebs.Im Standby -Modus beträgt der Ausgangsanschluss MO Hz.Der Standby -Modus wird freigegeben, indem der Zustand von M1 = M2 = M3 = L und M1 = M2 = M3 = H in einen anderen Zustand geändert wird.Das Eingangssignal wird nach der Freisetzung des Standby -Modus etwa 200 μs nicht akzeptiert.
Verfallmodus
Das Laden und Entladen eines Stroms im PWM -Modus erfordert typischerweise etwa fünf Zyklen in OSCM.Der 40 -prozentige schnelle Zerfallsmodus wird durch Induzieren des Zerfalls innerhalb der letzten beiden Zyklen des schnellen Zerfallsmodus eingeleitet, wobei das Verhältnis von 40 Prozent konsequent festhält.Die Beziehung zwischen der Master Taktfrequenz (FMCLK), der OSCM -Frequenz (FOSCM) und der PWM -Frequenz (FCHOP) wird wie folgt dargestellt:
foscm = 1/20 × fmclk
FCHOP = 1/100 × FMCLK
Wenn ROSC = 51 kΩ, die Masteruhr = 4 MHz, OSCM = 200 kHz, die Frequenz von PWM (FCHOP) = 40 kHz.
Anfangsmodus
Beim Einsetzen des Resets sind die Phasenströme wie folgt.
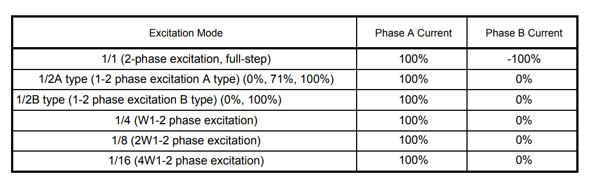
Die Stromrichtung wird wie folgt definiert.
Out1a → out2a: Vorwärtsrichtung
Out1b → out2b: Vorwärtsrichtung
Anwendung von TB6600HG
Nachfolgend sind einige Anwendungen von TB6600HG aufgeführt.
• Rücklichter
• Gastgewerbegebäude
• Großes LED -Display im Freien
• Alternative zu versteckten Lichtern
• Industrielle Hoch-Bay-Lichter
• LED -Hintergrundbeleuchtung mit großer Formatierung
• LED -Hintergrundbeleuchtung anzeigen
• Kamera-fähige Smartphones
• Topologien für Aufstiegs- oder Stufenfahrer
Gemeinsame Fehler und Lösungen von TB6600HG
Im Folgenden sind einige gängige Fehler zu TB6600HG und deren Lösungen aufgeführt, damit Sie bei der Begegnung mit Fehlern schnell Maßnahmen ergreifen und den normalen Betrieb des Geräts schützen können.
Ausfall eins: Überhitzung des Fahrers Chip
Der TB6600HG -Chip selbst ist zu heiß, wahrscheinlich aufgrund einer übermäßigen Belastung oder einer schlechten Wärmeableitungsbedingungen.
Lösung: Erhöhen Sie die Wärmeabteilung
Wir müssen Kühlkörper oder Ventilatoren auf dem Treiberchip und Motor hinzufügen, um sicherzustellen, dass sie während der Arbeit vollständig die Wärme auflösen können.Gleichzeitig müssen wir die Umgebung um den Fahrerchip und den Motor gut belüftet halten, um eine Überhitzung zu vermeiden.
Ausfall zwei: Motor dreht sich in die falsche Richtung
Nachdem der Motor das Antriebssignal erhalten hat, steht die Drehrichtung nicht mit dem Erwarteten überein, es kann das Steuersignal falsch sein oder der Antriebschip ist nicht ordnungsgemäß konfiguriert.
Lösung: Überprüfen Sie das Steuersignal
Wir müssen die an den TB6600HG gesendeten Steuersignale sorgfältig überprüfen, um sicherzustellen, dass das Richtungssteuerungssignal und das Impulssignal korrekt sind.Wenn ein Mikrocontroller zum Senden der Signale verwendet wird, überprüfen Sie bitte den Programmcode und die PIN -Konfiguration.
Ausfall drei: Motor dreht sich nicht
Der Motor antwortet nicht nach Erhalt des Antriebssignals, es kann sein, dass der Treiberchip nicht ordnungsgemäß funktioniert oder ein Problem mit der Verbindung zwischen dem Motor und dem Treiberchip vorliegt.
Lösung: Überprüfen Sie die Stromversorgung und die Verbindung
Wir müssen sicherstellen, dass die Stromversorgung des TB6600HG normal ist und die Verbindung zwischen dem Motor und dem Treiberchip fest ist.Wir überprüfen die Spannung und den Strom in der Schaltung mit einem Multimeter, um sicherzustellen, dass sie sich im normalen Bereich befinden.
Ausfall vier: schwerwiegende Motorheizung
Der Motor erzeugt während des Betriebs übermäßige Wärme, die durch übermäßige Strom oder schlechte Wärmeableitungen verursacht werden kann.
Lösung: Passen Sie die aktuelle Einstellung an
Wenn der Motor schwere Wärme erzeugt, können wir versuchen, den Ausgangsstrom des Treiberchips zu reduzieren.Durch Einstellen des aktuellen Einstellungsstifts von TB6600HG können wir die Größe des Ausgangsstroms effektiv einschränken, was wiederum die Belastung des Motors verringert und einen stabilen und sicheren Betrieb des Motors gewährleistet.
Häufig gestellte Fragen [FAQ]
1. Was ist der Betriebstemperaturbereich von TB6600HG?
Die Betriebstemperatur von TB6600Hg liegt zwischen -30 ° C bis 85 ° C.
2. Was ist TB6600HG?
TB6600HG ist eine Art von Stepper -Motorfahrer, mit der Steppermotoren in verschiedenen Anwendungen wie CNC -Maschinen, 3D -Druckern, Robotik und Automatisierungssystemen gesteuert wurden.
3. Was sind die wichtigsten Merkmale von TB6600HG?
Zu den TB6600HG-Funktionen gehören einstellbarer Motorstrom, Einstellungen für die Schrittauflösung, ein integrierter Überhitzungsschutz und opto-isolierte Eingänge für die Signalsteuerung.